Loading...
Searching...
No Matches
CanWrapper Class Reference
A wrapper class for the MCP2515 CAN controller. More...
#include <CanWrapper.h>
Public Member Functions | |
| CanWrapper (uint8_t csPin, uint32_t speed, SPIClass *spi) | |
| Constructor that initializes the MCP2515 object with the provided parameters. | |
| void | begin () |
| Initializes the CAN module. | |
| bool | sendMessage (uint8_t id, const void *data, uint8_t length) |
| Sends a CAN message. | |
| bool | readMessage (uint8_t *id, byte *data) |
| Reads a CAN message. | |
Detailed Description
A wrapper class for the MCP2515 CAN controller.
Constructor & Destructor Documentation
◆ CanWrapper()
|
inline |
Member Function Documentation
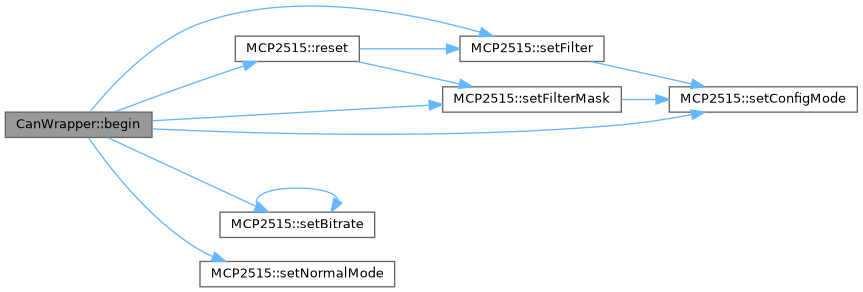
◆ begin()
| void CanWrapper::begin | ( | ) |
Initializes the CAN module.
Here is the call graph for this function:
Here is the caller graph for this function:

◆ readMessage()
| bool CanWrapper::readMessage | ( | uint8_t * | id, |
| byte * | data | ||
| ) |
Reads a CAN message.
- Parameters
-
id Pointer to store the ID of the received CAN message. data Pointer to store the data of the received CAN message.
- Returns
- True if a message was read successfully, false otherwise.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ sendMessage()
| bool CanWrapper::sendMessage | ( | uint8_t | id, |
| const void * | data, | ||
| uint8_t | length | ||
| ) |
Sends a CAN message.
- Parameters
-
id The ID of the CAN message. data Pointer to the data to be sent. length Length of the data to be sent.
- Returns
- True if the message was sent successfully, false otherwise.
Here is the call graph for this function:

Here is the caller graph for this function:

The documentation for this class was generated from the following files:
- lib/Can/src/CanWrapper.h
- lib/Can/src/CanWrapper.cpp