Loading...
Searching...
No Matches
Motor Class Reference
Motor class used to control simple DC motors. More...
#include <Motor.h>
Public Member Functions | |
| Motor (byte pwm, byte dir, bool invert=false) | |
| Create object and set motor pins. | |
| void | begin () |
| Initialize motors. | |
| void | write (int value) |
| Sets the motor speed. | |
Detailed Description
Motor class used to control simple DC motors.
Constructor & Destructor Documentation
◆ Motor()
| Motor::Motor | ( | byte | pwm, |
| byte | dir, | ||
| bool | invert = false |
||
| ) |
Create object and set motor pins.
- Parameters
-
pwm PWM pin. dir Direction pin. invert Invert motor direction, usuful when motors are mounted opposite to one another.
Member Function Documentation
◆ begin()
| void Motor::begin | ( | ) |
Initialize motors.
Here is the caller graph for this function:

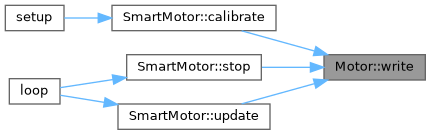
◆ write()
| void Motor::write | ( | int | value | ) |
Sets the motor speed.
- Parameters
-
value Speed of the motor, ranging from 0 to maximum PWM value.
Here is the caller graph for this function:
The documentation for this class was generated from the following files: